Term 1 - Project 1: Lane Line Detection
Lane Line Detection Project - Using Hough Transforms and Other Computer Vision Techniques to detect road lane lines from an image.
Projects completed and WIP for Udacity’s Self-Driving Car Engineer Nanodegree.
Lane Line Detection Project - Using Hough Transforms and Other Computer Vision Techniques to detect road lane lines from an image.
Traffic Sign Classifier Project - TensorFlow Multiclass Classifier to Classify Traffic Sign Images
Behavioral Cloning Project - Deep learning regressor, which learns the steering angle of a vehicle based on three camera vantage points.
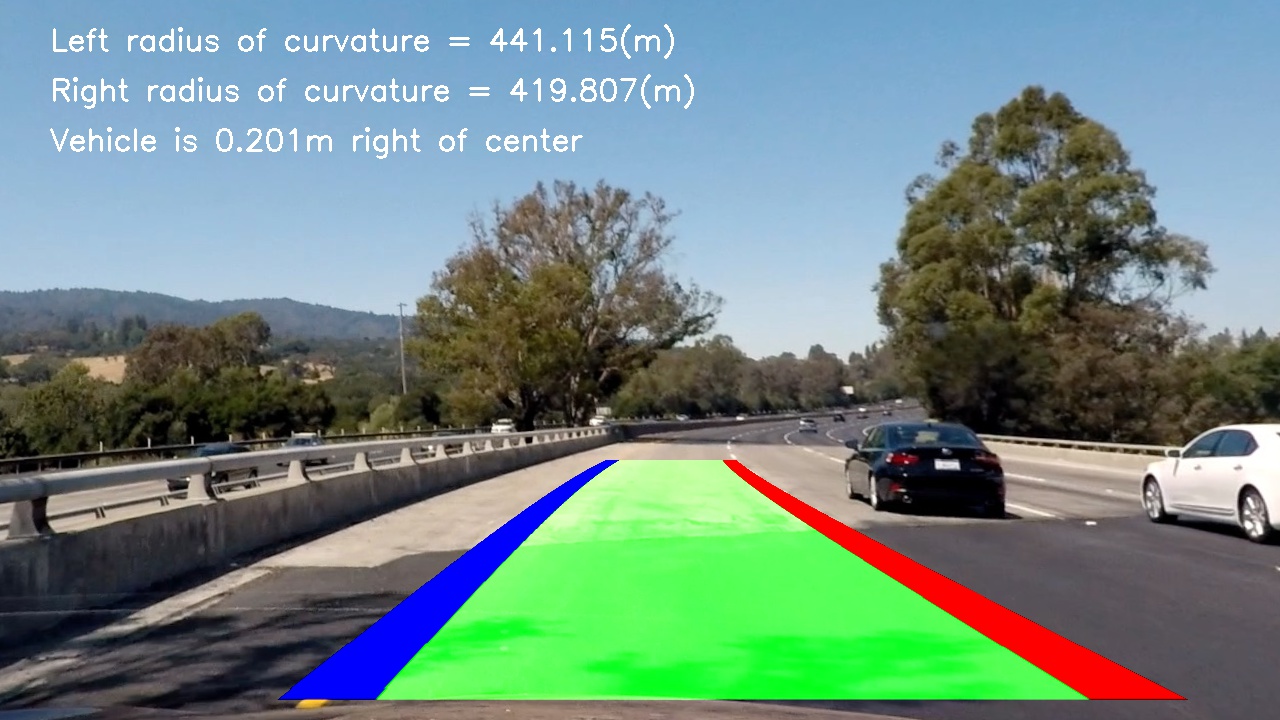
Advanced Lane Finding Project - One-Dimensional Convolution Methods for Detection of Lane Lines on Roads Which Curve.
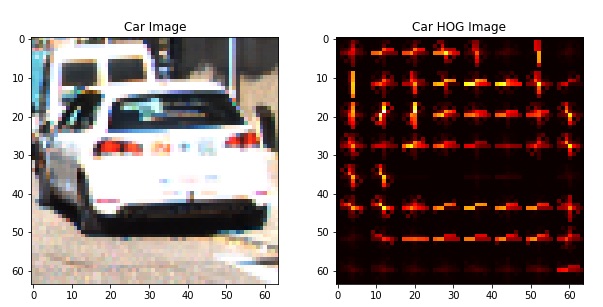
Vehicle Detection Project - Support Vector Machine model using Histogram of Gradients and Computer Vision methods to detect vehicles in a roadway from camer...
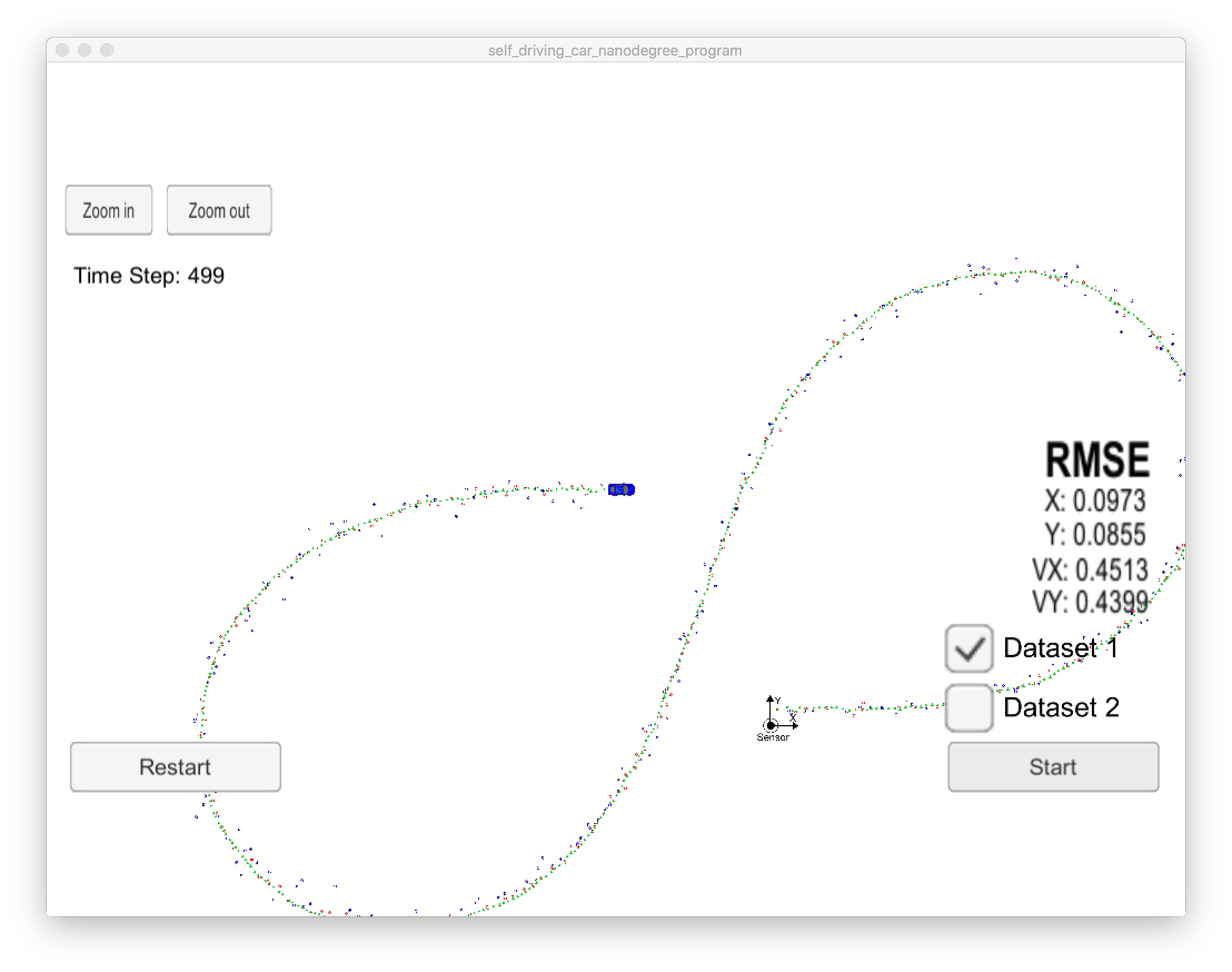
Extended Kalman Filters Project - Using radar and lidar sensors to estimate path of another object.